 |
 Gran parte dei pesci e degli uccelli usa muoversi in banchi o stormi numerosi e l'uomo in vari modi ha cercato di influenzare gli spostamenti di questi animali; in proposito, ad esempio, buoni risultati si sono ottenuti con le oche selvatiche che si fanno guidare dal volo di aerei ultraleggeri. Gran parte dei pesci e degli uccelli usa muoversi in banchi o stormi numerosi e l'uomo in vari modi ha cercato di influenzare gli spostamenti di questi animali; in proposito, ad esempio, buoni risultati si sono ottenuti con le oche selvatiche che si fanno guidare dal volo di aerei ultraleggeri.
Per situazioni nelle quali possa essere interessante "pilotare" gli spostamenti di banchi di pesci è stato sperimentato, con successo, il ricorso a piccoli pesci-robot. Come ha annunciato il Consiglio Nazionale delle Ricerche italiano, che ha condotto uno studio unitamente alla New York University, il pesce robot viene accettato come un leader da parte dei pesci reali che ne seguono i movimenti e la direzione.
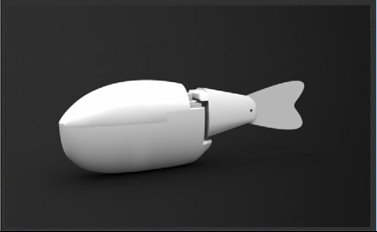
La ricerca è stata compiuta da Stefano Marras e Maurizio Porfiri che si sono avvalsi di un piccolo pesce di plastica, lungo 16 cm, realizzato mediante un processo di stereografia computerizzata. Il pesce meccanico può muovere la coda e, così facendo, crea una sorta di effetto-scia per il quale i pesci che seguono incontrano minore resistenza all'avanzamento – qualcosa di simile si produce nelle tipiche formazioni a V degli uccelli – e sono portati a seguire il pesce guida robot. La sperimentazione è avvenuta in un tunnel nel quale erano stati immessi dei ciprinidi Notemigonus Crysoleucas, d'acqua dolce, affini a carpe e tinche. La scelta di questi pesci è stata basata sulla loro facile reperibilità nel Nord America (la ricerca si è svolta a New York) e per il fatto che hanno un forte spirito gregario, con banchi che variano tra una decina e diverse centinaia di esemplari.
La locomozione biomimetica del pesce-robot, quindi, con un battito della coda su una frequenza predeterminata, attrae il banco di pesci gregari che, per effetto idrodinamico, compiono uno sforzo minore per nuotare nella sua scia.
|